本系列主要分享Nvidia官网相机开发文档
相机架构栈
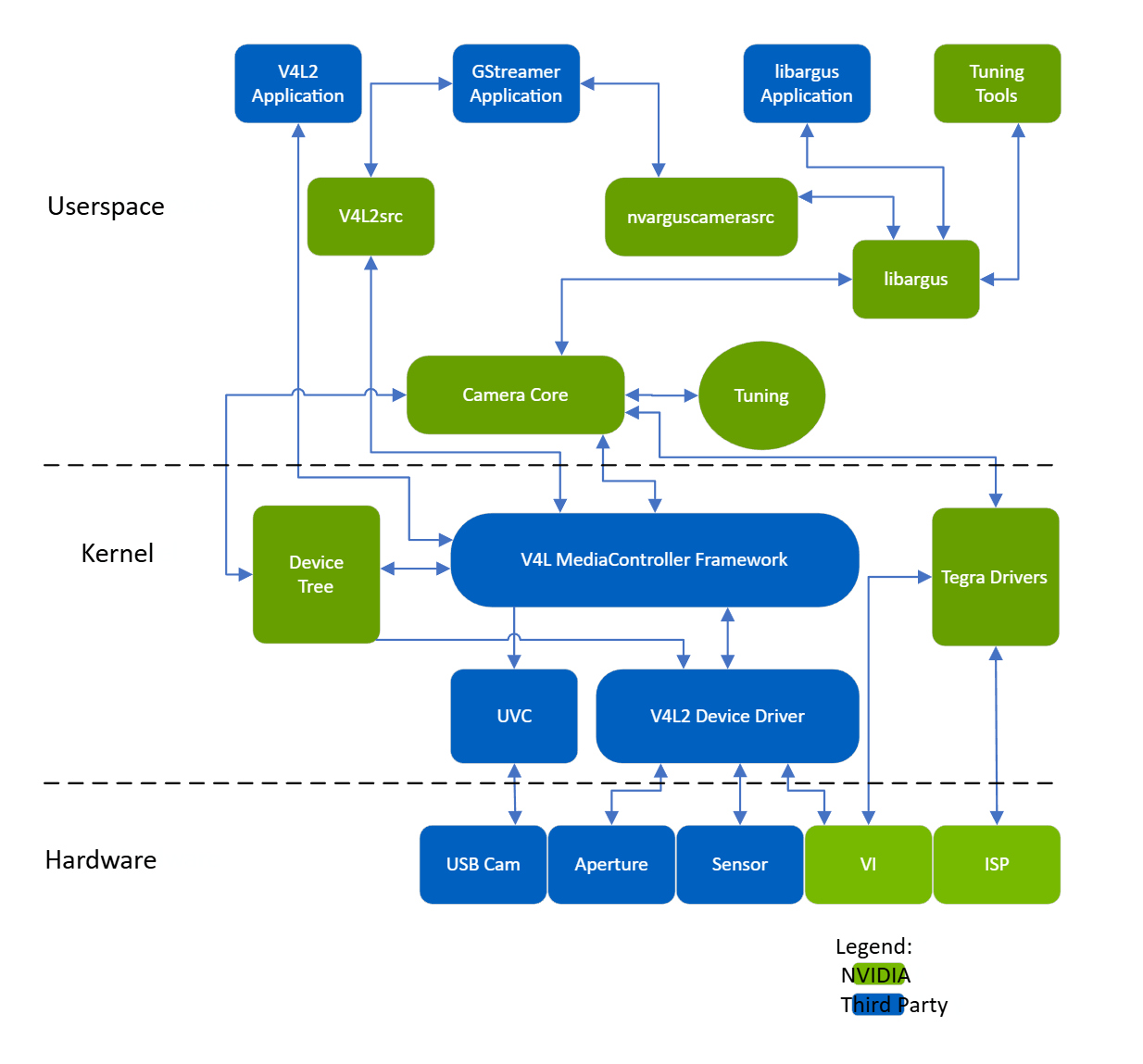
摄像头架构包含以下NVIDIA组件:
- libargus:提供基于摄像头核心堆栈的底层API。
- nvarguscamerasrc:NVIDIA摄像头GStreamer插件,提供通过ARGUS API控制ISP属性的选项。
- v4l2src:标准Linux V4L2应用程序,通过直接内核IOCTL调用访问V4L2功能。
NVIDIA提供OV5693拜耳传感器作为示例。NVIDIA已针对NVIDIA® Jetson™平台对该传感器进行调优。基于媒体控制器框架的驱动代码位于:
./kernel/nvidia/drivers/media/i2c/ov5693.c
NVIDIA为Jetson板级支持包(BSP)软件版本提供额外的传感器支持。开发者若需使用任何拜耳传感器及调优支持,必须与NVIDIA认证的摄像头合作伙伴协作。相关工作包括:
- 传感器驱动开发
- 用于传感器表征的定制工具
- 图像质量调优
- 这些工具和操作机制不属于公开的Jetson嵌入式平台(JEP)板级支持包发布内容。
摄像头相关API
下表描述了每种摄像头配置可用的摄像头 API。
| 摄像头 API | 使用 Jetson ISP(CSI 接口) | 不使用 Jetson ISP†(CSI 接口) | USB (UVC)‡(USB 接口) |
|---|---|---|---|
| libargus | ✓ | ||
| GStreamer (GST-nvarguscamerasrc) | ✓ | ||
| V4L2 | ✓ | ✓ |
† libargus 是访问摄像头的首选途径。
‡ 驱动程序不由 NVIDIA 提供;您必须自行编写。 您可以支持的外设总线设备包括:
- 以太网
- 非 UVC USB
注意
默认的 OV5693 摄像头不包含集成的 ISP。对参考摄像头使用 V4L2 API 将记录“原始”拜耳数据。
验证和测试 V4L2 驱动程序的方法
驱动程序开发完成后,请使用提供的工具或应用程序来验证和测试 V4L2 驱动程序接口。
有关通用的 GStreamer 和多媒体操作,请参阅《Multimedia 用户指南》,该指南可从 Jetson 下载中心获取。
使用 libargus 底层 API 的应用程序
NVIDIA Multimedia API 提供了示例程序,演示了如何使用 libargus API 来预览、捕获和记录传感器数据流。
该 Multimedia API 可通过 NVIDIA® SDK Manager 安装,或作为独立软件包安装。
Multimedia API 文档位于 Jetson Linux API Reference中,该文档包含在 Jetson Linux 文档包内,并可从 Jetson 文档站点的 "Jetson Software Documentation" 页面单独下载。
使用 GStreamer 与 nvarguscamerasrc 插件的应用程序
利用受支持的 nvarguscamerasrc GStreamer 插件及 ARGUS API 的摄像头功能,可以:
- 为拜耳传感器启用 ISP 处理
- 执行拜耳捕获中 ISP 的格式转换部分
例如,对于格式为 1080p/30/BGGR 的拜耳传感器:
- 将预览保存到文件:
$ gst-launch-1.0 nvarguscamerasrc num-buffers=200 ! 'video/x-raw(memory:NVMM), width=1920, height=1080, framerate=30/1, format=NV12' ! omxh264enc ! qtmux ! filesink location=test.mp4 -e
- 将预览渲染到 HDMI® 屏幕:
$ gst-launch-1.0 nvarguscamerasrc ! 'video/x-raw(memory:NVMM), width=1920, height=1080, format=(string)NV12, framerate=(fraction)30/1' ! nvoverlaysink -e
有关 ARGUS API 的更多信息,请参阅Jetson Linux API 中 Libargus Camera API 页面。
使用 GStreamer 与 V4L2 源插件的应用程序
使用拜耳传感器、YUV 传感器或 USB 摄像头输出未经 ISP 处理的 YUV 图像时,不会调用 NVIDIA 摄像头软件堆栈。
例如,对于格式为 480p/30/YUY2 的 USB 摄像头:
- 将预览保存到文件(基于软件转换器):
$ gst-launch-1.0 v4l2src num-buffers=200 device=/dev/video0 ! 'video/x-raw, format=YUY2, width=640, height=480, framerate=30/1' ! videoconvert ! omxh264enc ! qtmux ! filesink location=test.mp4 -ev
- 如果您从远程控制台操作,请先输入
export DISPLAY=:0。然后将预览渲染到屏幕:
$ gst-launch-1.0 v4l2src device=/dev/video0 ! 'video/x-raw, format=YUY2, width=640, height=480, framerate=30/1' ! xvimagesink -ev
对于格式为 480p/30/UYVY 的 YUV 传感器:
- 将预览保存到文件(基于硬件加速转换器):
$ gst-launch-1.0 -v v4l2src device=/dev/video0 ! 'video/x-raw, format=(string)UYVY, width=(int)640, height=(int)480, framerate=(fraction)30/1' ! nvvidconv ! 'video/x-raw(memory:NVMM), format=(string)NV12' ! omxh264enc ! qtmux ! filesink location=test.mp4 -ev
- 将预览渲染到屏幕:
$ export DISPLAY=:0 // 如果您从远程控制台操作
$ gst-launch-1.0 v4l2src device=/dev/video0 ! 'video/x-raw, format=(string)UYVY, width=(int)640, height=(int)480, framerate=(fraction)30/1' ! xvimagesink -ev
直接使用 V4L2 IOCTL 的应用程序
在传感器启动阶段,可使用 V4L2 IOCTL 来验证基本功能。
例如,从格式为 1080p/30/RG10 的拜耳传感器捕获数据:
$ v4l2-ctl --set-fmt-video=width=1920,height=1080,pixelformat=RG10 --stream-mmap --stream-count=1 -d /dev/video0 --stream-to=ov5693.raw
ISP 配置
Camera Core 发布包包含针对参考传感器的模型 ISP 配置文件。
注意
具有集成 ISP 的 CSI 摄像头和 USB 摄像头可在 ISP 旁路模式下工作。Jetson 开发者套件(OV5693)的 RAW 摄像头模块提供了可用的 ISP 支持。
对其他摄像头模块的额外 ISP 支持需通过第三方合作伙伴实现。
无限超时支持
此使用场景不同于典型的摄像头使用场景。典型使用场景中,摄像头传感器连续流式传输帧,摄像头硬件和驱动程序在等待摄像头帧时支持有限超时。
而在此使用场景中,摄像头传感器被触发生成指定数量的帧后,会无限期停止流传输(即"无限超时")。每当摄像头驱动程序恢复流传输时,它必须能够无超时问题地恢复捕获帧。摄像头驱动程序和硬件必须始终准备好捕获来自 CSI 传感器的帧。摄像头驱动程序不知道流传输何时会重新开始。
为支持此使用场景,摄像头传感器硬件模块必须支持暂停和恢复流传输。
要启用此功能,需通过将 enableCamInfiniteTimeout环境变量设置为 1 来运行摄像头服务(即 nvargus-daemon服务):
$ sudo service nvargus-daemon stop
$ sudo enableCamInfiniteTimeout=1 nvargus-daemon
Mesa 安装导致的符号链接变更
安装 Mesa EGL 可能会创建 /usr/lib/<ABI_directory>/libEGL.so符号链接,从而覆盖驱动程序必须使用的实现库 /usr/lib/<ABI_directory>/tegra-egl/libEGL.so的符号链接。这会干扰任何 EGL™ 的客户端,包括发布中使用 EGLStreams 的库。
在本版本中,系统重启时会替换该符号链接,从而在重启后修复此问题。之前的版本已对 libGL和 libglx等其他库应用了类似的解决方法。
其他参考
有关使用 V4L2 或 GStreamer 与其他 Jetson 多媒体组件集成的详细信息,请参阅 Jetson Linux API Reference。
有关 Argus 的详细信息,请参阅Jetson Linux API 中 Libargus Camera API 页面。
Q&A
Q:什么是Mesa?为什么它安装会导致问题?
A:Mesa 是一个开源、跨平台的图形库实现。它提供了对多种图形 API 的支持,最著名的是 OpenGL 和 Vulkan。
Mesa EGL 是 Mesa 项目的一部分,它实现了 EGL API。EGL 是 Khronos Group 定义的一个标准,它充当了OpenGL(或 OpenGL ES)等渲染API 与底层原生平台窗口系统之间的接口。简单来说,OpenGL 负责画图,而 EGL 负责在屏幕上创建一个可以作画的“画布”,并管理这个画布。
在 Jetson 平台上的核心冲突
冲突在于:
- **NVIDIA 的专有实现:**Jetson 平台使用 NVIDIA 的专有图形驱动( Tegra 驱动)。这个驱动自带了一整套图形库,包括它自己的
libEGL.so、libGL.so等。这些库为了充分发挥 NVIDIA GPU(在 Jetson 上是 Tegra GPU)的硬件加速能力而进行了高度优化。在 Jetson 上,计算机视觉、摄像头处理、多媒体(如您提到的nvoverlaysink)等核心功能都严重依赖 NVIDIA 的 EGL 实现来高效处理数据(尤其是通过 EGLStreams 机制)。 - Mesa 的开源实现:Mesa 是一个通用的开源实现,它不针对任何特定硬件的私有特性进行优化。当您在系统上安装 Mesa(例如,通过
apt install mesa-utils或某些依赖它的软件包时),它可能会将其库文件安装到系统库目录(如/usr/lib/aarch64-linux-gnu/)。安装过程中,Mesa 通常会创建一个名为libEGL.so.1的文件,并创建一个指向它的符号链接libEGL.so。这个符号链接会覆盖掉系统原本指向 NVIDIA 实现的符号链接。
冲突的后果
当应用程序(例如使用摄像头的 GStreamer 管道)试图运行时:
- 它本应加载
/usr/lib/aarch64-linux-gnu/tegra-egl/libEGL.so(NVIDIA 的优化版本)。 - 但由于符号链接被更改,它实际上加载了
/usr/lib/aarch64-linux-gnu/libEGL.so.1(Mesa 的通用版本)。 - Mesa 的版本不包含 NVIDIA 的私有扩展(如 EGLStreams),导致依赖于这些功能的应用程序崩溃或无法正常工作。您文档中提到的“包括使用 EGLStreams 的库”正是指 Jetson 的多媒体组件。
解决方案(如文档所述)
NVIDIA 在较新的 Jetson Linux 版本中加入了自动修复机制:
-
重启修复: 系统重启时,一个启动脚本会检测到符号链接被更改,并将其重新指向正确的 NVIDIA 库。
-
手动修复: 如果不想重启,可以手动重新创建符号链接。例如:
# 首先检查当前链接指向哪里 ls -l /usr/lib/aarch64-linux-gnu/libEGL.so # 如果它指向的是 Mesa 的库而不是 tegra-egl 下的库,则需要修复 sudo ln -sf tegra-egl/libEGL.so.1 /usr/lib/aarch64-linux-gnu/libEGL.so